|
|

About AMP Lab Projects Downloads Publications People Links
Project - Information
Sharing for Traffic-Aware Route
· Contact
|
Motivation and Goal |
For automatic driving, one of the main issues is route planning. Most current approach for route planning is to find the best route ahead of time without the real-time traffic consideration.
In this project, we assume that some vehicles can share information among themselves locally, while the others can not. Based on the shared information, each information-shared vehicle analyzes the local traffic condition in real-time, and builds up the dynamic map, which contains real-time traffic information for route planning by some simple operations to minimize the overall traveling time.
Distributed intelligent vehicles with "Boids" behavior
We introduce a "Boids" concept to model the intelligent vehicles. Each intelligent vehicle follows simple rules/operations and communicates locally with the neighbor vehicles. They dynamically plan their route based on the local traffic information within the vehicle communication range.
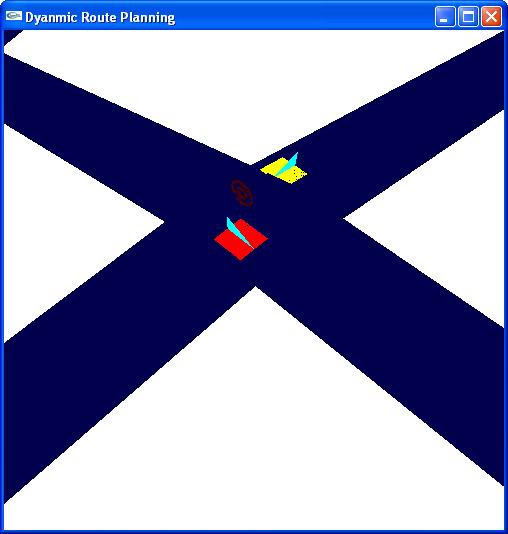
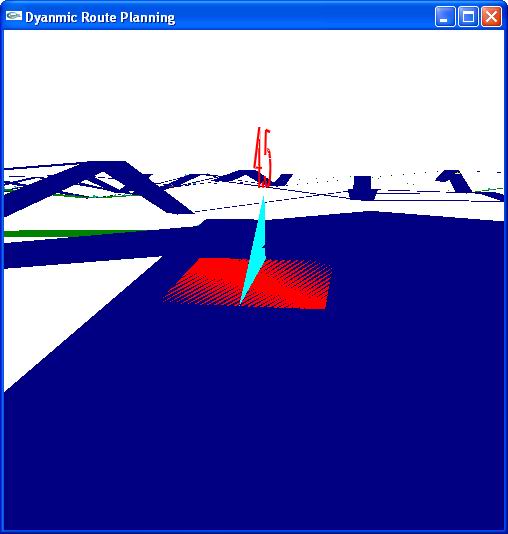
Our simulation contains three types of vehicles. The intelligent vehicles (red in the video) plan the route by dynamic path planning to minimize the total traveling time with awareness of the traffic flow. The traditional vehicles (yellow in the video) plan the route by the shortest time planning without awareness of the traffic flow. The broken vehicle (blue in the video) blocks the road to cause the traffic jam. From the video clips, the experimental results show that the intelligent vehicles will travel from the starting point to the destination faster than the traditional ones on average. When a broken vehicle appears on the road, the intelligent vehicle will plan the route dynamically to avoid traffic jam.
The video clips of the simulator:
 Simulation of
Traffic-Jam (7.1MB QuickTime MPEG-4 format).
Simulation of
Traffic-Jam (7.1MB QuickTime MPEG-4 format).
 Simulation with synthetic
map (4.7MB
QuickTime MPEG-4 format).
Simulation with synthetic
map (4.7MB
QuickTime MPEG-4 format).
 Simulation with real map (5.3 MB QuickTime MPEG-4 format).
Simulation with real map (5.3 MB QuickTime MPEG-4 format).
The snapshots of
the simulator:
|
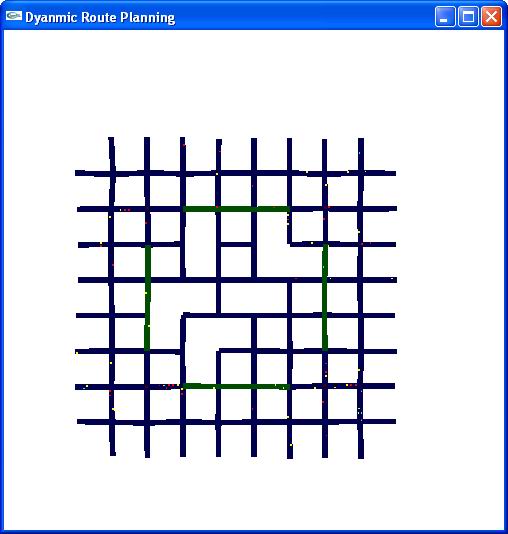
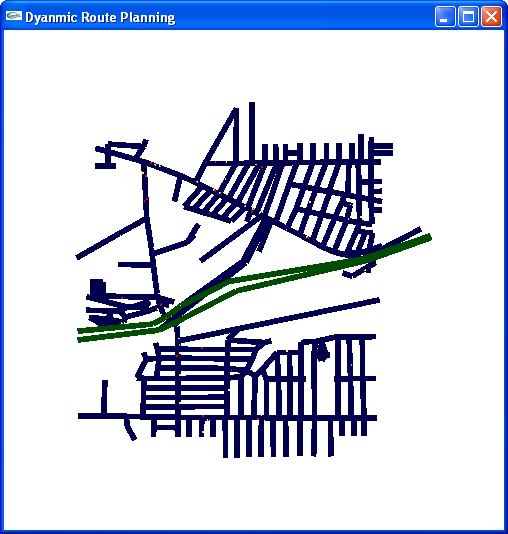
Fig. 1 The overall view of the simulated map |
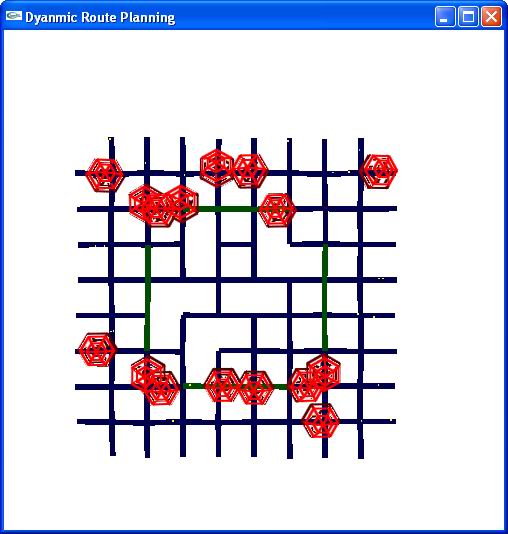
Fig. 2 The communication range of the intelligent vehicles |
|
Fig. 3 The traffic light on the map |
Fig. 4 The view of a single vehicle |
|
|
|
|
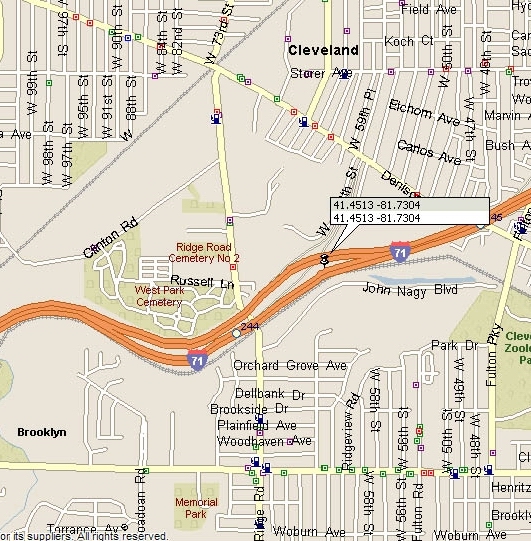
Fig. 5 The overall view of simulator with real map data (Cleveland) |
|
The experimental results:
We compared the performance of our proposed traffic-aware routing algorithm with the traditional non-traffic-aware routing algorithm on our traffic simulation tool. The intelligent vehicles and the traditional vehicles are generated at random with the same distribution. The starting point and the destination of each vehicle are generated at random as well. In each experiment, we specify the traffic condition and the communication range of the intelligent vehicles to evaluate the average traveling time from the starting point to the destination. The experimental results show that
1. The intelligent vehicles have better performance than traditional vehicles.
2. The longer the communication range, the better the performance of the intelligent vehicles is.
3. The heavier the traffic, the bigger the difference of performance between the intelligent vehicles and the traditional vehicles is.
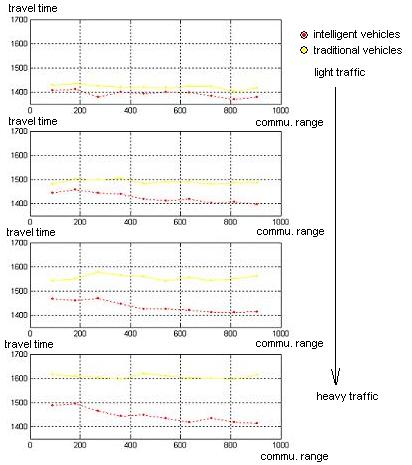
Fig. 5 The performance of the intelligent and traditional vehicles
Any suggestions or comments are welcome. Please send them to Wende Zhang.
|
This
website is maintained by Wende
Zhang |