About AMP Lab Projects Downloads Publications People Links Project - Stop Sign Detection |


| Motivation and Goal |
Human eyes cannot focus on the entire field of vision. The fovia, which is located in the center of the retina, has the ability to see a small area of the visual field in sharp focus, while the periphery is blurry. This is why we must move our eyes or turn our heads when we want to look at an object. It is difficult to recognize objects in our peripheral vision simply because they are not in focus.
The fact that it is difficult to recognize objects in our peripheral vision poses the following problem for drivers: traffic signs are often located along the sides of roads, which would be in one’s peripheral vision if he/she is looking at the road straight ahead, and this can make traffic sign detection and recognition difficult. The images in Figure 1 illustrate the difficulty associated with recognizing a traffic sign in a one’s peripheral vision.
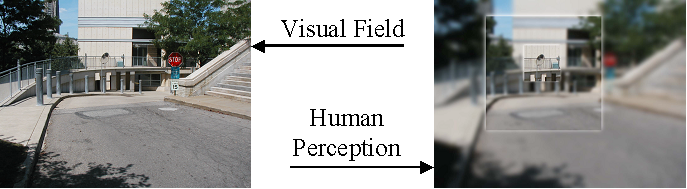
Figure 1: A comparison to show that objects in one’s peripheral vision are not in focus and are difficult to recognize
An automatic stop sign detector could help reduce the number of missed stop sign detections by automatically detecting the stop signs and either informing the driver of the upcoming sign via an audio or visual signal or deploying an automatic braking system that safely slows the vehicle’s speed.
The FAR and FRR for the automatic stop sign detector are non-zero. Thus, the following question naturally arises, Will an automatic stop sign detector that has a non-zero error rate benefit drivers? Here benefiting the driver means helping the driver detect the stop signs earlier and helping the driver make fewer detection mistakes. We designed and conducted a user study to help answer the above question.
The input to our automatic stop sign detection system is a video sequence taken from a forward-looking vehicle mounted camera. We use a modified version of the histogram-based framework to detect regions in a single frame that are likely to contain a stop sign. Then we analyze the size and aspect ratio of these regions to remove any regions that do not agree with the shape of a stop sign. Finally, since the histogram-based framework does not include temporal information, we add this information by comparing the detection results of the current frame in the video sequence to previous frames. This leads to a system that detects stop signs on a frame-by-frame basis, but uses information from previous frames to validate the detection results for the current frame. The system is illustrated with the block diagram shown in Figure 2.
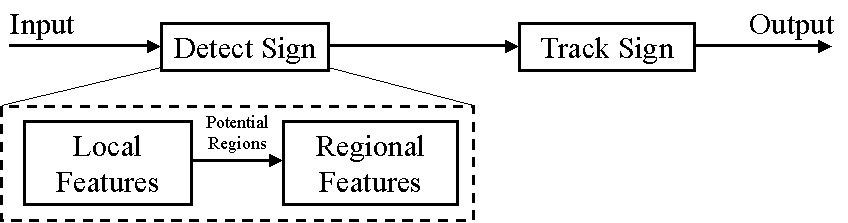
Figure 2: A block diagram of the automatic stop sign detector
After the regional feature analysis, the FAR and FRR are 0.0613 and 0.0963, respectively, when trained/tested on a database of 232 images using the 3-fold cross validation method. Since the testing database consists of still images, tracking results that can be compared to those presented above for the local and regional feature analyses are not available, but applying the tracking stage to a few video sequences suggests this stage will improve the error rates.
To determine if the automatic stop sign detector benefits drivers, we had 43 people watch 60 video sequences taken from a forward-looking vehicle mounted camera and asked them to press a button as soon as they detected a stop sign in the video sequence. For half of the trials, the output of the stop sign detector was available and for the other half of the trials it was not. Comparing the detection times in the two cases allows us to determine if people detect stop signs earlier with the help of the detector. We can also see if people make fewer mistakes (i.e. not detecting a stop sign that is present in the video or incorrectly detecting a stop sign that is not in the video) when the help of the stop sign detector is available.
Some subjects admittedly chose to ignore the help of the detector. If we only consider the data from subjects that benefited from the detector (i.e. subjects that detected the stop signs faster when they had the help of the detector compared to when they did not have the help of the detector), the data suggests that the stop sign detector will help drivers detect stop signs faster. The mean detection time for subjects that benefited from the detector are shown in Figure 3. All of the differences are statistically significant with p<0.02.
Figure 3: The statistically significant mean differences in detection times for subjects that benefited from the stop sign detector
Automatic Sign Detection for Intelligent Vehicles
By Michael H. Kaye
A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Electrical and Computer Engineering Department of Electrical and Computer Engineering, Carnegie Mellon University, Pittsburgh, Pennsylvania, USA
Any suggestions or comments are welcome. Please send them to Michael Kaye.
|