Henry Shu
Research Interests
- Computer vision
- Algorithms
Selected Projects
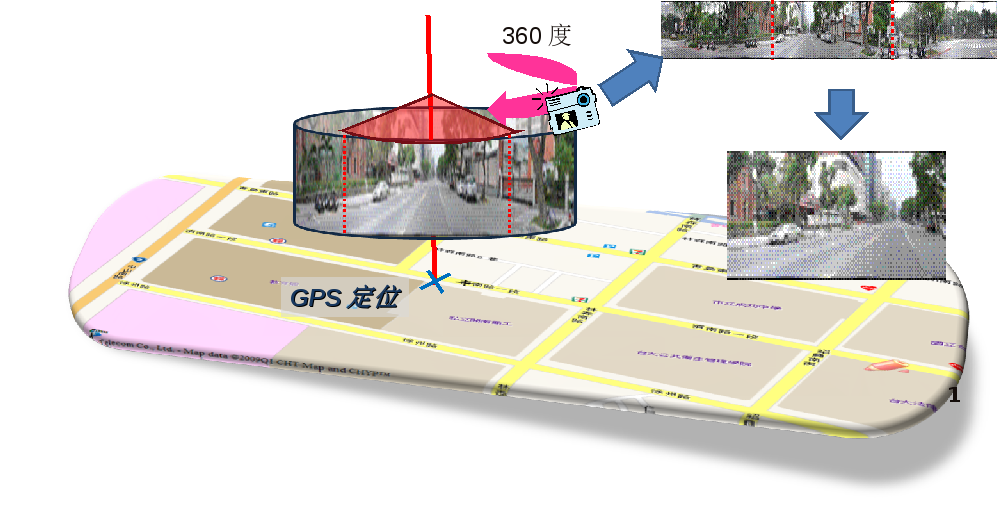
GPS and Street View Integration
The goal is to create a platform that automatically integrates GPS coordinate information with GIS information of roads, POI's, and buildings in a user-friendly, guidable way. (Click on image.)
Landmark Recognition
The goal is to automatically categorize a large number (&ge 30) of landmarks.

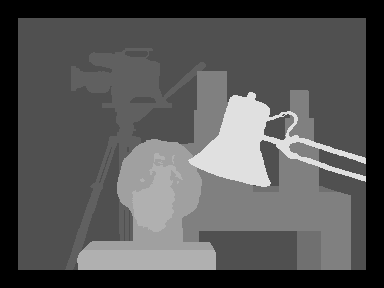
Stereo Depth Estimation
The goal is to apply plane sweeping in a non-greedy way to help improve depth estimation accuracy before the smoothness constraint is used.